Аппаратура потребителей спутниковых радионавигационных систем (дисциплина) — различия между версиями
Korogodin (обсуждение | вклад) (→Этап 2. Моделирование) |
Korogodin (обсуждение | вклад) |
||
| (не показаны 45 промежуточных версий 1 участника) | |||
| Строка 4: | Строка 4: | ||
По дисциплине подготовлен [[ЭУМК АП СРНС|электронный учебно-методический комплекс]]. | По дисциплине подготовлен [[ЭУМК АП СРНС|электронный учебно-методический комплекс]]. | ||
| + | |||
| + | Черновик '''учебного пособия по курсу''' [https://github.com/Korogodin/gnssrec доступен по ссылке]. | ||
== Календарный план == | == Календарный план == | ||
| Строка 10: | Строка 12: | ||
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
| − | ! Неделя || | + | ! Неделя || Даты || Лекция || Лабораторная || Контрольное мероприятие |
|- align=center | |- align=center | ||
| − | | | + | | 2 || 07.09 |
| Основы СРНС. [[media:Receivers_Segments.pdf|Сегменты СРНС]]. [[media:Receivers_PosMethods.pdf|Методы позиционирования]]. | | Основы СРНС. [[media:Receivers_Segments.pdf|Сегменты СРНС]]. [[media:Receivers_PosMethods.pdf|Методы позиционирования]]. | ||
| − | | | + | | [https://goo.gl/forms/R7Vos1KsJ1taqqXo2 Ошибки позиционирования в городских условиях] |
| | | | ||
|- align=center | |- align=center | ||
| − | | | + | | 3 || 13.09.21-19.09.21 |
| Навигационные сигналы. | | Навигационные сигналы. | ||
| | | | ||
| Строка 25: | Строка 27: | ||
|- align=center | |- align=center | ||
| − | | | + | | 4 || 20.09.21-26.09.21 |
| Антенна, МШУ | | Антенна, МШУ | ||
| − | | | + | | |
| КМ-1: Модель сигнала ГНСС | | КМ-1: Модель сигнала ГНСС | ||
|- align=center | |- align=center | ||
| − | | | + | | 5 || 27.09.21-03.10.21 |
| Радиочастотный блок <br> ([[media:20111008_АП_СРНС_Лекция_3_презентация.pdf|Аналогово-цифровое преобразование. Синтезатор частот. План частот АП СРНС.]] ) | | Радиочастотный блок <br> ([[media:20111008_АП_СРНС_Лекция_3_презентация.pdf|Аналогово-цифровое преобразование. Синтезатор частот. План частот АП СРНС.]] ) | ||
| | | | ||
| − | | | + | | |
|- align=center | |- align=center | ||
| − | | | + | | 6 || 04.10.21-10.10.21 |
| Математическая модель коррелятора <br> ([[media:АП_СРНС_corr.pdf|Статистический эквивалент коррелятора]]) | | Математическая модель коррелятора <br> ([[media:АП_СРНС_corr.pdf|Статистический эквивалент коррелятора]]) | ||
| | | | ||
| − | | | + | | КМ-2: Ошибки позиционирования в городских условиях |
|- align=center | |- align=center | ||
| − | | | + | | 7 || 11.10.21-17.10.21 |
| Аппаратная реализация коррелятора <br> ([[media:20111005_АП_СРНС_Лекция_4_презентация.pdf|Принципы построения и структура коррелятора. Цифровой генератор гармонического сигнала и дальномерного кода.]]) | | Аппаратная реализация коррелятора <br> ([[media:20111005_АП_СРНС_Лекция_4_презентация.pdf|Принципы построения и структура коррелятора. Цифровой генератор гармонического сигнала и дальномерного кода.]]) | ||
| | | | ||
| Строка 49: | Строка 51: | ||
|- align=center | |- align=center | ||
| − | | | + | | 8 || 18.10.21-24.10.21 |
| Следящие системы <br> ([[media:20111215_АП_СРНС_Лекция_8_презентация.pdf|Система слежения за фазой сигнала. Структурная схема ССФ, дискриминаторы, следящий фильтр.]] <br> [[media:20111215_АП_СРНС_Лекция_9_презентация.pdf|Система слежения за частотой. Структурная схема ССЧ, дискриминаторы, следящий фильтр.]] <br> [[media:20111215_АП_СРНС_Лекция_10_презентация.pdf|Система слежения за задержкой. Структурная схема ССЗ, дискриминаторы, следящий фильтр. <br> Система слежения за задержкой с поддержкой от ФАП. Комплексный фильтр.]]) | | Следящие системы <br> ([[media:20111215_АП_СРНС_Лекция_8_презентация.pdf|Система слежения за фазой сигнала. Структурная схема ССФ, дискриминаторы, следящий фильтр.]] <br> [[media:20111215_АП_СРНС_Лекция_9_презентация.pdf|Система слежения за частотой. Структурная схема ССЧ, дискриминаторы, следящий фильтр.]] <br> [[media:20111215_АП_СРНС_Лекция_10_презентация.pdf|Система слежения за задержкой. Структурная схема ССЗ, дискриминаторы, следящий фильтр. <br> Система слежения за задержкой с поддержкой от ФАП. Комплексный фильтр.]]) | ||
| [https://goo.gl/XruJBM GNSS Planning] | | [https://goo.gl/XruJBM GNSS Planning] | ||
| − | | КМ- | + | | КМ-3: Статистический эквивалент коррелятора |
|- align=center | |- align=center | ||
| − | | | + | | 9 || 25.10.21-31.10.21 |
| Оценка SNR, детекторы захвата, детекторы CC | | Оценка SNR, детекторы захвата, детекторы CC | ||
| | | | ||
| − | | | + | | |
|- align=center | |- align=center | ||
| − | | | + | | 10 || 01.11.21-07.11.21 |
| Обнаружение сигнала. <br> ([[media:20111005_АП_СРНС_Лекция_5_презентация.pdf|Обнаружение сигнала. Алгоритмы, статистические характеристики обнаружения.]]) | | Обнаружение сигнала. <br> ([[media:20111005_АП_СРНС_Лекция_5_презентация.pdf|Обнаружение сигнала. Алгоритмы, статистические характеристики обнаружения.]]) | ||
| | | | ||
| Строка 67: | Строка 69: | ||
|- align=center | |- align=center | ||
| − | | | + | | 11 || 08.11.21-14.11.21 |
| Поиск сигнала <br> ([[media:20111008_АП_СРНС_Лекция_6_презентация.pdf|Поиск сигнала по частоте и задержке. Алгоритмы поиска, быстрый поиск сигнала.]] <br> [[media:20111017_АП_СРНС_Лекция_7_презентация.pdf|Блок быстрого поиска]]) | | Поиск сигнала <br> ([[media:20111008_АП_СРНС_Лекция_6_презентация.pdf|Поиск сигнала по частоте и задержке. Алгоритмы поиска, быстрый поиск сигнала.]] <br> [[media:20111017_АП_СРНС_Лекция_7_презентация.pdf|Блок быстрого поиска]]) | ||
| | | | ||
| Строка 73: | Строка 75: | ||
|- align=center | |- align=center | ||
| − | | | + | | 12 || 15.11.21-21.11.21 |
| Символьная и оверлейная синхронизация <br> | | Символьная и оверлейная синхронизация <br> | ||
| [[Исследование_коррелятора_АП_СРНС_ГЛОНАСС_с_помощью_имитационной_модели_(лабораторная_работа)|Исследование коррелятора АП СРНС с помощью имитационной модели]] | | [[Исследование_коррелятора_АП_СРНС_ГЛОНАСС_с_помощью_имитационной_модели_(лабораторная_работа)|Исследование коррелятора АП СРНС с помощью имитационной модели]] | ||
| − | | КМ- | + | | КМ-4: Исследование коррелятора АП СРНС ГЛОНАСС с помощью имитационной модели |
|- align=center | |- align=center | ||
| − | | | + | | 13 || 22.11.21-28.11.21 |
| [[media:20111215_АП_СРНС_Лекция_11_презентация.pdf|Демодуляция навигационных данных]] | | [[media:20111215_АП_СРНС_Лекция_11_презентация.pdf|Демодуляция навигационных данных]] | ||
| | | | ||
| − | | | + | | |
|- align=center | |- align=center | ||
| − | | | + | | 14 || 29.11.21-05.12.21 |
| Кадровая синхронизация, [[media:20111215_АП_СРНС_Лекция_12_презентация.pdf|декодирование]], парсинг | | Кадровая синхронизация, [[media:20111215_АП_СРНС_Лекция_12_презентация.pdf|декодирование]], парсинг | ||
| | | | ||
| − | | | + | | КМ-5: Прогнозирование спутникового созвездия |
|- align=center | |- align=center | ||
| − | | | + | | 15 || 08.12.21-12.12.21 |
| Формирование измерений, расчет положения спутника | | Формирование измерений, расчет положения спутника | ||
| | | | ||
| − | | | + | | |
|- align=center | |- align=center | ||
| − | | | + | | 16 || 13.12.21-19.12.21 |
| Модель наблюдений псевдодальности. <br> [[media:20111128_АП_СРНС_Лекция_14_презентация.pdf|Вторичная обработка измерений. Одношаговый алгоритм решения навигационной задачи.]] <br> [[media:20111215_АП_СРНС_Лекция_16_презентация.pdf|Контроль целостности]] | | Модель наблюдений псевдодальности. <br> [[media:20111128_АП_СРНС_Лекция_14_презентация.pdf|Вторичная обработка измерений. Одношаговый алгоритм решения навигационной задачи.]] <br> [[media:20111215_АП_СРНС_Лекция_16_презентация.pdf|Контроль целостности]] | ||
| Решение навигационной задачи по псевдодальномерным измерениям | | Решение навигационной задачи по псевдодальномерным измерениям | ||
| − | | КМ- | + | | КМ-6: Решение навигационной задачи по псевдодальномерным измерениям |
|- align=center | |- align=center | ||
| − | | | + | | 17 || 20.12.21-26.12.21 |
| Помехоустойчивость АП СРНС | | Помехоустойчивость АП СРНС | ||
| | | | ||
| − | | | + | | |
|- align=center | |- align=center | ||
| − | | | + | | 18 || 27.12.21-02.01.21 |
| Зачет | | Зачет | ||
| | | | ||
| Строка 116: | Строка 118: | ||
|} | |} | ||
| − | [[media: | + | [[media:АПСРНС_2021_Списки.ods|Журнал успеваемости]]. |
== Правила аттестации == | == Правила аттестации == | ||
| Строка 124: | Строка 126: | ||
При написании отчетов следует опираться на правила оформления [https://mpei.ru/Science/ScienceDocuments/Documents/Polojenie_2018/0_GOST_7.32-2017.pdf ГОСТ 7.32] (в части форматирования, оформления рисунков, таблиц, списков и т.д.). | При написании отчетов следует опираться на правила оформления [https://mpei.ru/Science/ScienceDocuments/Documents/Polojenie_2018/0_GOST_7.32-2017.pdf ГОСТ 7.32] (в части форматирования, оформления рисунков, таблиц, списков и т.д.). | ||
| − | Приемка осуществляется через репозиторий на github на базе проекта [https://github.com/Korogodin/ | + | Приемка осуществляется через репозиторий на github на базе проекта [https://github.com/Korogodin/gnssrecbasics2021 gnssrecbasics2021]. |
== Демо модели == | == Демо модели == | ||
| Строка 331: | Строка 333: | ||
== Вопросы к экзамену == | == Вопросы к экзамену == | ||
| − | Экзамен проводится в | + | Экзамен проводится в письменной форме: тест, задача и один экзаменационный вопрос ([[media:Вопросы_экз_АП_СРНС.doc|экзаменационные вопросы]]). При подготовке рекомендуется использовать книги по тематике, [[media:2013_ЭУМК_С3.33_Лекции_АП_СРНС.pdf|конспекты лекций]] и презентации. |
== Курсовая работа == | == Курсовая работа == | ||
| − | Название: ''' | + | Название: '''Расчет траектории движения спутника GPS по данным с демодулятора его сигнала''' |
| − | Курсовая работа по АП СРНС выполняется во втором семестре. В рамках | + | Курсовая работа по АП СРНС выполняется во втором семестре. В рамках КР студенты знакомятся с рядом инструментов и техник, используемых при разработке навигационных приемников. |
| − | Цель проекта - | + | Цель проекта - разработка модулей разбора навигационного сообщения GPS и расчета положения спутника, предназначенных для использования в составе навигационного приемника. |
Требования к разрабатываемому программному модулю: | Требования к разрабатываемому программному модулю: | ||
| Строка 349: | Строка 351: | ||
Для достижения цели выполняется ряд задач, соответствующих этапам проекта и контрольным мероприятиям: | Для достижения цели выполняется ряд задач, соответствующих этапам проекта и контрольным мероприятиям: | ||
| − | * | + | * разработка модуля разбора символов навигационного сообщения |
| − | * | + | * расчет положения КА в Matlab/Python и его проверка сторонними сервисами; |
| − | * реализация | + | * реализация модуля расчета положения КА на С/С++ и его тестирование. |
| − | + | ||
| − | + | ||
На каждом из этапов действуют следующие правила: | На каждом из этапов действуют следующие правила: | ||
* Взаимодействие осуществляется через github (пул реквесты, комментарии) | * Взаимодействие осуществляется через github (пул реквесты, комментарии) | ||
| + | * Отчет оформляется по ГОСТ 7.32 | ||
* '''Этап сдан тогда, когда принят пул реквест''' | * '''Этап сдан тогда, когда принят пул реквест''' | ||
| − | |||
| − | |||
| − | + | {| class="wikitable" | |
| + | |+ Варианты заданий: | ||
| + | |- | ||
| + | ! Студент !! Номер спутника = варианта !! Логи !! Примечание | ||
| + | |- | ||
| + | ! Антропов Евгений Александрович | ||
| + | | 1 || [[media:2022_KR_01.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Бахолдин Никита Владимирович | ||
| + | | 3 || [[media:2022_KR_03.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Берестнев Владимир Сергеевич | ||
| + | | 8 || [[media:2022_KR_08.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Дубинин Леонид Андреевич | ||
| + | | 10 || [[media:2022_KR_10.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Еловский Никита Станиславович | ||
| + | | 12 || [[media:2022_KR_12.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Иванцова Дарья Николаевна | ||
| + | | 17 || [[media:2022_KR_17.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Капитонов Александр Ильич | ||
| + | | 19 || [[media:2022_KR_19.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Коробков Андрей Юрьевич | ||
| + | | 21 || [[media:2022_KR_21.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Куксин Владислав Александрович | ||
| + | | 22 || [[media:2022_KR_22.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Кусакин Павел Александрович | ||
| + | | 31 || [[media:2022_KR_31.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Ливенцов Василий Александрович | ||
| + | | 14 || [[media:2022_KR_14.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Михайлов Иван Олегович | ||
| + | | 24 || [[media:2022_KR_24.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Муратов Николай Сергеевич | ||
| + | | 4 || [[media:2022_KR_04.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Попов Максим Геннадьевич | ||
| + | | 6 || [[media:2022_KR_06.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Солнцева Милана Константиновна | ||
| + | | 7 || [[media:2022_KR_07.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Танкина Анна Михайловна | ||
| + | | 9 || [[media:2022_KR_09.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Цымбал Григорий Романович | ||
| + | | 16 || [[media:2022_KR_16.tar.gz|tar.gz]] || | ||
| + | |- | ||
| + | ! Чепелев Игорь Игоревич | ||
| + | | 26 || [[media:2022_KR_26.tar.gz|tar.gz]] || | ||
| + | |} | ||
| − | |||
| − | |||
| − | + | === Этап 1. Обработка логов навигационного приемника === | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | '''Дедлайн''': 04.03.22 (устранение замечаний и итоговый мёрдж до 13.03.22) | |
| − | + | ||
| − | + | Конечная цель всего курсового проекта - получить библиотеку функций на Си++, позволяющую рассчитывать положение спутника GPS по данным с демодулятора его сигнала L1 C/A. | |
| + | На первом этапе реализуем модуль разбора навигационного сообщения до структуры эфемерид, сравним результаты со сторонней программой. | ||
| − | + | В неизвестной локации установлен навигационный приемник, принимающий сигналы GPS L1C/A и логирующий результаты этого приема в формате [https://navis.ru/downloads/SOFT/NV08C_BINR_Protocol_Specification_V13_ENG_10082012.pdf NVS BINR]. | |
| − | + | Собранный на пятиминутном интервале файл приложен в архиве под именем BINR.bin, см. таблицу вариантов. | |
| − | + | Файл содержит наблюдения псевдодальностей и прочих радионавигационных параметров, демодулированные и разобранные данные навигационного сообщения. | |
| − | + | ||
| − | + | Для удобства студентов данные демодулятора продублированы в текстовый файл in.txt. Каждая строка файла содержит данные одного сабфрейма одного навигационного сигнала в формате: | |
| − | + | <source lang="bash"> | |
| − | + | 1 0 013 0R GpsL1CA # 13 212130404 29 125 53 100010111010101010101010001010010111000011001010010111111000101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100101010101010101010101010111100 | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
</source> | </source> | ||
| + | где ''# 13'' - номер спутника, ''212130404'' - счетчик сабфреймов в сигнале, ''53'' - ID сабфрейма в навигационном сообщении, где в первых трех битах содержится номер сабфрейма в фрейме (5 в данном примере), а далее - номер фрейма в сообщении (6 в данном примере), ''1000101110...'' символы с демодулятора в порядке возрастания времени слева направо. | ||
| + | |||
| + | Требуется: | ||
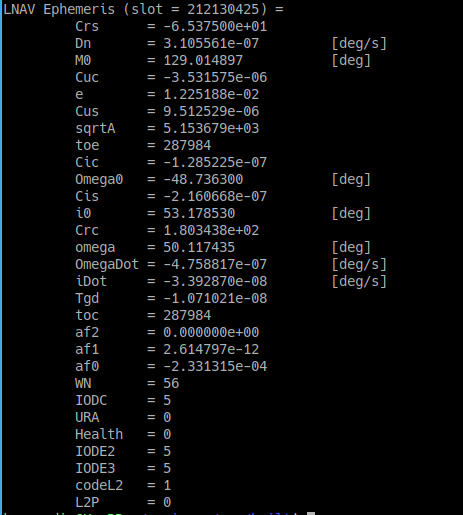
| + | # Разработать программу, обрабатывающую файл in.txt и выводящую в файл out.txt таблицу эфемерид для спутника согласно варианту [[media:Screenshot_20220215_221319.png|в заданном формате]]. | ||
| + | # Обработать файл BINR.bin с помощью программы RTKNAVI из состава RTKLIB. Определить день и место проведения наблюдений, значения эфемерид для спутника согласно номеру варианта (меню открывается в левом нижнем углу экрана по нажатию на квадрат) | ||
| + | # Сравнить полученные таблицы | ||
| + | # Оформить код программы и разместить на Github | ||
| + | # Оформить отчет по этапу и разместить на Github | ||
| + | # Завести Pull Request | ||
| − | + | Программа должна компилироваться gcc, все входные данные брать из in.txt, весь вывод осуществлять в out.txt. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | Работа осуществляется в репозитории на github на базе [https://github.com/Korogodin/ | + | Работа осуществляется в репозитории на github на базе [https://github.com/Korogodin/gnssrecbasics2021 gnssrecbasics2021]. Для этого: |
# Завести, если до сих пор нет, аккаунт на github | # Завести, если до сих пор нет, аккаунт на github | ||
| − | # | + | # Если ранее не сделано, сделать форк проекта [https://github.com/Korogodin/gnssrecbasics2021 gnssrecbasics2021] (маленькая кнопка сверху справа в вэб-интерфейсе) |
# Установить на рабочем компьютере git (для выполнения последующих этапов удобнее будет сделать это в ОС GNU/Linux, вероятно, на виртуальной машине) | # Установить на рабочем компьютере git (для выполнения последующих этапов удобнее будет сделать это в ОС GNU/Linux, вероятно, на виртуальной машине) | ||
| − | # Клонировать свой форк на рабочий компьютер (<code>git clone https://github.com/MySuperAccount/ | + | # Клонировать свой форк на рабочий компьютер (<code>git clone https://github.com/MySuperAccount/gnssrecbasics2021.git</code>) |
# Промежуточные и итоговые результаты по первому этапу хранить в каталоге processing (<code>git pull; git add <files>; git commit -m "Сделал то-то то-то"; git push</code>) | # Промежуточные и итоговые результаты по первому этапу хранить в каталоге processing (<code>git pull; git add <files>; git commit -m "Сделал то-то то-то"; git push</code>) | ||
# По результатам первого этапа завести Pull Request в исходный проект '''в ветку, название которой совпадает с вашей фамилией''' (кнопка наверху в вэб-интерфейсе) | # По результатам первого этапа завести Pull Request в исходный проект '''в ветку, название которой совпадает с вашей фамилией''' (кнопка наверху в вэб-интерфейсе) | ||
| Строка 432: | Строка 461: | ||
Этап сдан тогда, когда ваш ПР принят. | Этап сдан тогда, когда ваш ПР принят. | ||
| − | === Этап 2. Моделирование === | + | === Этап 2. Моделирование траектории движения === |
| − | '''Дедлайн''': | + | '''Дедлайн''': 13.04.22 (исправления замечаний до 20.04.22) |
Эфемериды - параметры некоторой модели движения спутника. | Эфемериды - параметры некоторой модели движения спутника. | ||
В разных ГНСС эти модели разные, а значит отличается и формат эфемерид, и алгоритмы расчета положения спутника. | В разных ГНСС эти модели разные, а значит отличается и формат эфемерид, и алгоритмы расчета положения спутника. | ||
| − | Одна из самых простых и удобных моделей - [http://navipedia.org/index.php/GPS_and_Galileo_Satellite_Coordinates_Computation в системе GPS] | + | Одна из самых простых и удобных моделей - [http://navipedia.org/index.php/GPS_and_Galileo_Satellite_Coordinates_Computation в системе GPS]. |
| − | Требуется реализовать на языке Matlab или Python функцию расчета положения спутника | + | Требуется реализовать на языке Matlab или Python функцию расчета положения спутника GPS на заданный момент по шкале времени UTC. |
В качестве эфемерид использовать данные, полученные на предыдущем этапе. | В качестве эфемерид использовать данные, полученные на предыдущем этапе. | ||
| − | Построить трехмерные графики множества положений спутника | + | Построить трехмерные графики множества положений спутника GPS с системным номером, соответствующим номеру студента по списку. Графики в двух вариантах: в СК ECEF WGS84 и соответствующей ей инерциальной СК. Положения должны соответствовать суточному интервалу на дне формирования наблюдений, определенном на предыдущем этапе. Допускается использовать одни и те же эфемериды на весь рассматриваемый интервал. |
| − | + | Вывести значения координат спутника в файл out.txt в системе ECEF WGS 84 в виде строк: Секунда_от_начала_дня X Y Z | |
| + | |||
| + | Используя оценку местоположения с предыдущего этапа, построить Sky Plot за указанный временной интервал и сравнить результат с [http://www.trimble.com/gnssplanningonline/ Trimble GNSS Planning Online]. | ||
Оформить отчет по результатам этапа: | Оформить отчет по результатам этапа: | ||
| − | # Реализация в Matlab или Python | + | # Реализация в Matlab или Python (описание модели и её листинг) |
# Таблица использованных эфемерид | # Таблица использованных эфемерид | ||
# Трехмерные графики положений спутника в ECEF и ECI (не забудьте подписать оси, изобразите соответствующую Земле сферу в начале СК) | # Трехмерные графики положений спутника в ECEF и ECI (не забудьте подписать оси, изобразите соответствующую Земле сферу в начале СК) | ||
# Расчётный и полученный в GNSS Planing Online SkyView | # Расчётный и полученный в GNSS Planing Online SkyView | ||
| − | |||
| − | |||
Работы по данному этапу осуществляются в каталоге simulation. | Работы по данному этапу осуществляются в каталоге simulation. | ||
Правила приемки этапа те же, что и на первом этапе. | Правила приемки этапа те же, что и на первом этапе. | ||
| − | === Этап 3. Реализация === | + | === Этап 3. Реализация модуля расчета координат === |
| − | '''Дедлайн''': | + | '''Дедлайн''': 11.05.22 (исправления до 18.05.22) |
| − | Требуется разработать на языке С/С++ функцию расчета положения спутника | + | Требуется разработать на языке С/С++ функцию расчета положения спутника GPS на заданное время по шкале UTC, минимизируя время её исполнения и количество затрачиваемой оперативной памяти. |
Вызов функции не должен приводить к выбросу исключений или утечкам памяти при любом наборе входных данных. | Вызов функции не должен приводить к выбросу исключений или утечкам памяти при любом наборе входных данных. | ||
| Строка 470: | Строка 499: | ||
Поэтому отобразить модель из Matlab/Python в прошивку приемника дословно, как правило, не получается. В рассматриваемом примере потребуется, как минимум, выполнить свою реализацию решения трансцендентного уравнения. | Поэтому отобразить модель из Matlab/Python в прошивку приемника дословно, как правило, не получается. В рассматриваемом примере потребуется, как минимум, выполнить свою реализацию решения трансцендентного уравнения. | ||
| − | Программный модуль должен сопровождаться unit-тестами | + | Программный модуль должен сопровождаться unit-тестами (например, используя Check): |
* Тесты функции решения уравнения Кеплера | * Тесты функции решения уравнения Кеплера | ||
| − | * Тест расчетного положения спутника в сравнении с Matlab/Python | + | * Тест расчетного положения спутника в сравнении с Matlab/Python |
Во время второго теста должно вычисляться и выводиться средняя длительность исполнения функции. | Во время второго теста должно вычисляться и выводиться средняя длительность исполнения функции. | ||
Допускается использовать одни и те же эфемериды на весь рассматриваемый интервал (как на предыдущем этапе). | Допускается использовать одни и те же эфемериды на весь рассматриваемый интервал (как на предыдущем этапе). | ||
| − | Требуется провести проверку на утечки памяти с помощью утилиты valgrind. | + | Требуется провести проверку на утечки памяти (например, с помощью утилиты valgrind). |
Оформить отчет по результатам курсового проекта. | Оформить отчет по результатам курсового проекта. | ||
| Строка 483: | Строка 512: | ||
# Код реализации | # Код реализации | ||
# Вывод тестов, включая анализ времени исполнения | # Вывод тестов, включая анализ времени исполнения | ||
| − | # Вывод | + | # Вывод проверок на утечку памяти |
# Вывод по этапу | # Вывод по этапу | ||
# Заключение по проекту | # Заключение по проекту | ||
| − | + | Программа должна компилироваться gcc и использовать в качестве входных данных in.txt с первого этапа. | |
| − | + | Результат должен записываться в out.txt в строки формата, определенного на втором этапе. | |
| − | + | При тестировании должны сравниваться файлы out.txt второго и третьего этапов. | |
| − | + | Работы по третьему этапу следует вести в директории libgpssvpos. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | |||
Правила приемки этапа те же. | Правила приемки этапа те же. | ||
== Курсовая прошлых лет == | == Курсовая прошлых лет == | ||
| − | + | Задания в [[Курсовой проект АП СРНС 2020|2020]], в [[Курсовая работа АП СРНС 2021|2021]]. | |
[[Категория:АП СРНС (дисциплина)]] | [[Категория:АП СРНС (дисциплина)]] | ||
Текущая версия на 16:13, 19 мая 2024
Дисциплина "Аппаратура потребителей спутниковых радионавигационных систем" входит в вариативную часть общенаучного цикла занятий учебного плана подготовки специалистов по направлению 11.05.01 "Радиоэлектронные системы и комплексы".
Преподается осеннем и весеннем семестрах пятого года обучения. В осеннем семестре лекции и лабораторные занятия (итог - экзамен), в весеннем - курсовой проект.
По дисциплине подготовлен электронный учебно-методический комплекс.
Черновик учебного пособия по курсу доступен по ссылке.
Содержание |
[править] Календарный план
| Неделя | Даты | Лекция | Лабораторная | Контрольное мероприятие |
|---|---|---|---|---|
| 2 | 07.09 | Основы СРНС. Сегменты СРНС. Методы позиционирования. | Ошибки позиционирования в городских условиях | |
| 3 | 13.09.21-19.09.21 | Навигационные сигналы. | ||
| 4 | 20.09.21-26.09.21 | Антенна, МШУ | КМ-1: Модель сигнала ГНСС | |
| 5 | 27.09.21-03.10.21 | Радиочастотный блок (Аналогово-цифровое преобразование. Синтезатор частот. План частот АП СРНС. ) |
||
| 6 | 04.10.21-10.10.21 | Математическая модель коррелятора (Статистический эквивалент коррелятора) |
КМ-2: Ошибки позиционирования в городских условиях | |
| 7 | 11.10.21-17.10.21 | Аппаратная реализация коррелятора (Принципы построения и структура коррелятора. Цифровой генератор гармонического сигнала и дальномерного кода.) |
||
| 8 | 18.10.21-24.10.21 | Следящие системы (Система слежения за фазой сигнала. Структурная схема ССФ, дискриминаторы, следящий фильтр. Система слежения за частотой. Структурная схема ССЧ, дискриминаторы, следящий фильтр. Система слежения за задержкой. Структурная схема ССЗ, дискриминаторы, следящий фильтр. Система слежения за задержкой с поддержкой от ФАП. Комплексный фильтр.) |
GNSS Planning | КМ-3: Статистический эквивалент коррелятора |
| 9 | 25.10.21-31.10.21 | Оценка SNR, детекторы захвата, детекторы CC | ||
| 10 | 01.11.21-07.11.21 | Обнаружение сигнала. (Обнаружение сигнала. Алгоритмы, статистические характеристики обнаружения.) |
||
| 11 | 08.11.21-14.11.21 | Поиск сигнала (Поиск сигнала по частоте и задержке. Алгоритмы поиска, быстрый поиск сигнала. Блок быстрого поиска) |
||
| 12 | 15.11.21-21.11.21 | Символьная и оверлейная синхронизация |
Исследование коррелятора АП СРНС с помощью имитационной модели | КМ-4: Исследование коррелятора АП СРНС ГЛОНАСС с помощью имитационной модели |
| 13 | 22.11.21-28.11.21 | Демодуляция навигационных данных | ||
| 14 | 29.11.21-05.12.21 | Кадровая синхронизация, декодирование, парсинг | КМ-5: Прогнозирование спутникового созвездия | |
| 15 | 08.12.21-12.12.21 | Формирование измерений, расчет положения спутника | ||
| 16 | 13.12.21-19.12.21 | Модель наблюдений псевдодальности. Вторичная обработка измерений. Одношаговый алгоритм решения навигационной задачи. Контроль целостности |
Решение навигационной задачи по псевдодальномерным измерениям | КМ-6: Решение навигационной задачи по псевдодальномерным измерениям |
| 17 | 20.12.21-26.12.21 | Помехоустойчивость АП СРНС | ||
| 18 | 27.12.21-02.01.21 | Зачет |
[править] Правила аттестации
Обязательным условием для получения допуска к экзамену является выполнение всех контрольных мероприятий: сдача двух контрольных и защита 4 лабораторных работ.
При написании отчетов следует опираться на правила оформления ГОСТ 7.32 (в части форматирования, оформления рисунков, таблиц, списков и т.д.).
Приемка осуществляется через репозиторий на github на базе проекта gnssrecbasics2021.
[править] Демо модели
[править] Прогноз выходного сигнала коррелятора
Производится обработка сигнала Gps L1 C/A, сформированного лабораторным имитатором сигналов, синхронизированным с приемником. Сигнал перенесен с помощью РЧБ NT1065 на промежуточную частоту  МГц и преобразован многоразрядным АЦП с частотой сэмплирования
МГц и преобразован многоразрядным АЦП с частотой сэмплирования  МГц. Установленная на имитаторе мощность обеспечивает уровень отношения сигнал/шум
МГц. Установленная на имитаторе мощность обеспечивает уровень отношения сигнал/шум  дБГц, где
дБГц, где  - номер вариант по журналу.
- номер вариант по журналу.
В приемнике производтся корреляционная обработка сигнала, интервал накопления составляет  мс.
мс.
Сигнал имеет сдвиг частоты несущей  Гц, при этом опорный сигнал коррелятора имеет аналогичный сдвиг
Гц, при этом опорный сигнал коррелятора имеет аналогичный сдвиг  . Задержка огибающей известна точно и используется в опорном сигнале
. Задержка огибающей известна точно и используется в опорном сигнале  .
.
Задание: Построить на плоскости I,Q вид множества точек корреляционных сумм, полученных в ходе большого (сотни) числа экспериментов.
N = 30;
Fd = 99.375e6;
Td = 1/Fd;
T = 0.001;
fif = 8.34e6;
fd = 100 * N;
fd_rep = fd;
phi = 10 * N;
phi_rep = 20 * N;
qcno_dB = 27 + N;
qcno = 10^(qcno_dB/10);
stdn = 50/3;
A = sqrt(qcno * Td) * 2 * stdn; % qcno = A^2 / (4 stdn^2 Td)
fprintf('A = %f, stdn = %f\n', A, stdn);
L = fix(T * Fd);
t = (0:(L-1)) * Td;
PRN_Length = 1023;
PRN = (-1).^(rand(1, PRN_Length) > 0.5);
tau = 100500e-6;
tau_rep = tau;
nchip = mod(fix(PRN_Length*(t - tau )/T), PRN_Length) + 1;
nchip_rep = mod(fix(PRN_Length*(t - tau_rep)/T), PRN_Length) + 1;
Gc = PRN(nchip );
Gc_rep = PRN(nchip_rep);
So = A * Gc .* cos(2*pi*fif*t + 2*pi*fd *t + deg2rad(phi) );
S_rep_cos = Gc_rep .* cos(2*pi*fif*t + 2*pi*fd_rep*t + deg2rad(phi_rep));
S_rep_sin = Gc_rep .* sin(2*pi*fif*t + 2*pi*fd_rep*t + deg2rad(phi_rep));
K = 1000; I = nan(1, K); Q = nan(1,K);
for k = 1:K
n = randn(1,L)*stdn;
Gd = (-1).^(rand(1,1) > 0.5);
S = Gd * So;
y = S + n;
I(k) = y * S_rep_cos';
Q(k) = y * S_rep_sin';
end
maxIQ = 1.1*max(abs(I + 1i*Q));
figure(1);
plot(t*1e3, [y; S; A*Gc]);
xlabel('t, ms')
ylabel('y, S');
grid on
figure(2);
plot(I, Q, '*')
hold on
plot([-maxIQ maxIQ], [0 0], 'k');
plot([0 0], [-maxIQ maxIQ], 'k');
quiver(-maxIQ, 0, 2*maxIQ, 0, 1, 'k');
quiver(0, -maxIQ, 0, 2*maxIQ, 1, 'k');
hold off
xlabel('I')
ylabel('Q');
axis equal
grid on
[править] ЧАП и ФАП на стат эквивалентах
T = 0.010;
Xist = [10;
1];
Xfilt = [0;
0];
Xfilt_FLL = [0;
0];
F = [1 T;
0 1];
Tmod = 10;
K = fix(Tmod / T);
G = [0;
1];
std_ksi = 1.3 * T;
ksi = std_ksi * randn(1, K);
qcno_dB = 45;
qcno = 10^(qcno_dB/10);
stdnIQ = 7;
nI = stdnIQ * randn(1, K);
nQ = stdnIQ * randn(1, K);
A_IQ = sqrt(2*qcno*T) * stdnIQ;
dF_PLL = 20;
Kfilt_PLL = [ 8/3 * dF_PLL * T;
32/9 * dF_PLL^2 * T];
dF_FLL = 3;
Kfilt_FLL = [ 8/3 * dF_FLL * T;
32/9 * dF_FLL^2 * T];
t = (1:K)*T;
phi_ist = nan(1, K);
w_ist = nan(1, K);
phi_filt = nan(1, K);
w_filt = nan(1, K);
phi_filt_FLL = nan(1, K);
w_filt_FLL = nan(1, K);
phi_corr = 0; Iold = 0; Qold = 0;
for k = 1:K
Xist = F * Xist + G * ksi(k);
phi_ist(k) = Xist(1);
w_ist(k) = Xist(2);
% PLL
Xfilt_extr = F*Xfilt;
phi_extr = Xfilt_extr(1);
dPhi = phi_ist(k) - phi_extr;
Q = - A_IQ * sin(dPhi) + nQ(k);
Ud = -Q;
Sd = A_IQ;
Xfilt = Xfilt_extr + Kfilt_PLL * Ud/Sd;
phi_filt(k) = Xfilt(1);
w_filt(k) = Xfilt(2);
% FLL
Xfilt_extr_FLL = F*Xfilt_FLL;
w_extr = Xfilt_extr_FLL(1);
dPhi = phi_ist(k) - phi_corr;
phi_corr = phi_corr + w_extr * T;
dW = w_ist(k) - w_extr;
I = - A_IQ * cos(dPhi) + nI(k);
Q = - A_IQ * sin(dPhi) + nQ(k);
Ud = Q*Iold - I*Qold;
Sd = A_IQ;
Iold = I; Qold = Q;
Xfilt_FLL = Xfilt_extr_FLL + Kfilt_FLL * Ud/Sd;
phi_filt_FLL(k) = phi_corr;
w_filt_FLL(k) = Xfilt_FLL(1);
end
figure(1)
subplot(2,1,1)
plot(t, phi_ist/2/pi, t, phi_filt/2/pi, t, phi_filt_FLL/2/pi)
ylabel('\phi, cycles')
subplot(2,1,2)
plot(t, rad2deg(w_ist), t, rad2deg(w_filt), t, rad2deg(w_filt_FLL))
ylabel('\omega, Hz')
xlabel('t, sec')
[править] Вопросы к экзамену
Экзамен проводится в письменной форме: тест, задача и один экзаменационный вопрос (экзаменационные вопросы). При подготовке рекомендуется использовать книги по тематике, конспекты лекций и презентации.
[править] Курсовая работа
Название: Расчет траектории движения спутника GPS по данным с демодулятора его сигнала
Курсовая работа по АП СРНС выполняется во втором семестре. В рамках КР студенты знакомятся с рядом инструментов и техник, используемых при разработке навигационных приемников.
Цель проекта - разработка модулей разбора навигационного сообщения GPS и расчета положения спутника, предназначенных для использования в составе навигационного приемника.
Требования к разрабатываемому программному модулю:
- требования назначения;
- отсутствие утечек памяти;
- малое время выполнения;
- низкий расход памяти;
- корректное выполнение при аномальных входных данных.
Для достижения цели выполняется ряд задач, соответствующих этапам проекта и контрольным мероприятиям:
- разработка модуля разбора символов навигационного сообщения
- расчет положения КА в Matlab/Python и его проверка сторонними сервисами;
- реализация модуля расчета положения КА на С/С++ и его тестирование.
На каждом из этапов действуют следующие правила:
- Взаимодействие осуществляется через github (пул реквесты, комментарии)
- Отчет оформляется по ГОСТ 7.32
- Этап сдан тогда, когда принят пул реквест
| Студент | Номер спутника = варианта | Логи | Примечание |
|---|---|---|---|
| Антропов Евгений Александрович | 1 | tar.gz | |
| Бахолдин Никита Владимирович | 3 | tar.gz | |
| Берестнев Владимир Сергеевич | 8 | tar.gz | |
| Дубинин Леонид Андреевич | 10 | tar.gz | |
| Еловский Никита Станиславович | 12 | tar.gz | |
| Иванцова Дарья Николаевна | 17 | tar.gz | |
| Капитонов Александр Ильич | 19 | tar.gz | |
| Коробков Андрей Юрьевич | 21 | tar.gz | |
| Куксин Владислав Александрович | 22 | tar.gz | |
| Кусакин Павел Александрович | 31 | tar.gz | |
| Ливенцов Василий Александрович | 14 | tar.gz | |
| Михайлов Иван Олегович | 24 | tar.gz | |
| Муратов Николай Сергеевич | 4 | tar.gz | |
| Попов Максим Геннадьевич | 6 | tar.gz | |
| Солнцева Милана Константиновна | 7 | tar.gz | |
| Танкина Анна Михайловна | 9 | tar.gz | |
| Цымбал Григорий Романович | 16 | tar.gz | |
| Чепелев Игорь Игоревич | 26 | tar.gz |
[править] Этап 1. Обработка логов навигационного приемника
Дедлайн: 04.03.22 (устранение замечаний и итоговый мёрдж до 13.03.22)
Конечная цель всего курсового проекта - получить библиотеку функций на Си++, позволяющую рассчитывать положение спутника GPS по данным с демодулятора его сигнала L1 C/A. На первом этапе реализуем модуль разбора навигационного сообщения до структуры эфемерид, сравним результаты со сторонней программой.
В неизвестной локации установлен навигационный приемник, принимающий сигналы GPS L1C/A и логирующий результаты этого приема в формате NVS BINR. Собранный на пятиминутном интервале файл приложен в архиве под именем BINR.bin, см. таблицу вариантов. Файл содержит наблюдения псевдодальностей и прочих радионавигационных параметров, демодулированные и разобранные данные навигационного сообщения.
Для удобства студентов данные демодулятора продублированы в текстовый файл in.txt. Каждая строка файла содержит данные одного сабфрейма одного навигационного сигнала в формате:
где # 13 - номер спутника, 212130404 - счетчик сабфреймов в сигнале, 53 - ID сабфрейма в навигационном сообщении, где в первых трех битах содержится номер сабфрейма в фрейме (5 в данном примере), а далее - номер фрейма в сообщении (6 в данном примере), 1000101110... символы с демодулятора в порядке возрастания времени слева направо.
Требуется:
- Разработать программу, обрабатывающую файл in.txt и выводящую в файл out.txt таблицу эфемерид для спутника согласно варианту в заданном формате.
- Обработать файл BINR.bin с помощью программы RTKNAVI из состава RTKLIB. Определить день и место проведения наблюдений, значения эфемерид для спутника согласно номеру варианта (меню открывается в левом нижнем углу экрана по нажатию на квадрат)
- Сравнить полученные таблицы
- Оформить код программы и разместить на Github
- Оформить отчет по этапу и разместить на Github
- Завести Pull Request
{kind=link}
Программа должна компилироваться gcc, все входные данные брать из in.txt, весь вывод осуществлять в out.txt.
Работа осуществляется в репозитории на github на базе gnssrecbasics2021. Для этого:
- Завести, если до сих пор нет, аккаунт на github
- Если ранее не сделано, сделать форк проекта gnssrecbasics2021 (маленькая кнопка сверху справа в вэб-интерфейсе)
- Установить на рабочем компьютере git (для выполнения последующих этапов удобнее будет сделать это в ОС GNU/Linux, вероятно, на виртуальной машине)
- Клонировать свой форк на рабочий компьютер (
git clone https://github.com/MySuperAccount/gnssrecbasics2021.git) - Промежуточные и итоговые результаты по первому этапу хранить в каталоге processing (
git pull; git add <files>; git commit -m "Сделал то-то то-то"; git push) - По результатам первого этапа завести Pull Request в исходный проект в ветку, название которой совпадает с вашей фамилией (кнопка наверху в вэб-интерфейсе)
- Устранить все замечания, добиться принятия Pull Request'а.
Этап сдан тогда, когда ваш ПР принят.
[править] Этап 2. Моделирование траектории движения
Дедлайн: 13.04.22 (исправления замечаний до 20.04.22)
Эфемериды - параметры некоторой модели движения спутника. В разных ГНСС эти модели разные, а значит отличается и формат эфемерид, и алгоритмы расчета положения спутника.
Одна из самых простых и удобных моделей - в системе GPS.
Требуется реализовать на языке Matlab или Python функцию расчета положения спутника GPS на заданный момент по шкале времени UTC. В качестве эфемерид использовать данные, полученные на предыдущем этапе.
Построить трехмерные графики множества положений спутника GPS с системным номером, соответствующим номеру студента по списку. Графики в двух вариантах: в СК ECEF WGS84 и соответствующей ей инерциальной СК. Положения должны соответствовать суточному интервалу на дне формирования наблюдений, определенном на предыдущем этапе. Допускается использовать одни и те же эфемериды на весь рассматриваемый интервал.
Вывести значения координат спутника в файл out.txt в системе ECEF WGS 84 в виде строк: Секунда_от_начала_дня X Y Z
Используя оценку местоположения с предыдущего этапа, построить Sky Plot за указанный временной интервал и сравнить результат с Trimble GNSS Planning Online.
Оформить отчет по результатам этапа:
- Реализация в Matlab или Python (описание модели и её листинг)
- Таблица использованных эфемерид
- Трехмерные графики положений спутника в ECEF и ECI (не забудьте подписать оси, изобразите соответствующую Земле сферу в начале СК)
- Расчётный и полученный в GNSS Planing Online SkyView
Работы по данному этапу осуществляются в каталоге simulation. Правила приемки этапа те же, что и на первом этапе.
[править] Этап 3. Реализация модуля расчета координат
Дедлайн: 11.05.22 (исправления до 18.05.22)
Требуется разработать на языке С/С++ функцию расчета положения спутника GPS на заданное время по шкале UTC, минимизируя время её исполнения и количество затрачиваемой оперативной памяти. Вызов функции не должен приводить к выбросу исключений или утечкам памяти при любом наборе входных данных.
Функция расчета положения спутника в Matlab/Python относительно проста, т.к. доступны библиотеки линейной алгебры и решения уравнений. Но при разработке встраиваемого ПО приходится сохранять лицензионную частоту, минимизировать вычислительную нагрузку и затраты памяти. Поэтому отобразить модель из Matlab/Python в прошивку приемника дословно, как правило, не получается. В рассматриваемом примере потребуется, как минимум, выполнить свою реализацию решения трансцендентного уравнения.
Программный модуль должен сопровождаться unit-тестами (например, используя Check):
- Тесты функции решения уравнения Кеплера
- Тест расчетного положения спутника в сравнении с Matlab/Python
Во время второго теста должно вычисляться и выводиться средняя длительность исполнения функции. Допускается использовать одни и те же эфемериды на весь рассматриваемый интервал (как на предыдущем этапе).
Требуется провести проверку на утечки памяти (например, с помощью утилиты valgrind).
Оформить отчет по результатам курсового проекта. В качестве первых двух глав использовать отчёты с предыдущих этапов, в третьей главе отразить результаты этого этапа:
- Код реализации
- Вывод тестов, включая анализ времени исполнения
- Вывод проверок на утечку памяти
- Вывод по этапу
- Заключение по проекту
Программа должна компилироваться gcc и использовать в качестве входных данных in.txt с первого этапа. Результат должен записываться в out.txt в строки формата, определенного на втором этапе. При тестировании должны сравниваться файлы out.txt второго и третьего этапов.
Работы по третьему этапу следует вести в директории libgpssvpos.
Правила приемки этапа те же.